Avionics Software/New Graduate RotationJune 2024 - Present
Seattle, WA As a member of the Avionics Software New Graduate Rotation Program with Blue Origin, I’m developing safety-critical embedded software in C and C++ for the New Glenn medium-lift launch vehicle, slated for its maiden flight in 2024. Through my first year, I’ll also have the oppertunity to rotate through two additional buisness untis before choosing a final placement.
Engineeering Intern, Falcon 9 RecoverySep 2023 - Dec 2023
Cape Canaveral, FL As an engineering intern with Falcon 9 Recovery Operations, I developed ROS-based automation for maritime robotic systems, decreasing operator workload in complex mission operations. In parallel, I trained as a vehicle operator, performing recovery operations during launch, landing, and
calling out recovery events on the webcast.
Summer Engineering InternMay 2023 - Aug 2023
Pacadena, CA As a summer engineering intern with NASA/Jet Propulsion Laboritory, I implemented robot hand-eye calibration for the Ocean World Lander Autonomy Testbed using ROS and C++, improving end effector positioning accuracy by over 70%. I researched and presented literature review on robot hand-eye calibration methods to the project team to select an approach. I designed 3D printed motion capture marker nests in SOLIDWORKS, collected calibration datasets using automated Python scripts, and performed offline calibration using an
offline non-linear optimization library.
Software Robotics and Controls InternOct 2021 - May 2023
Redwood City, CA (Remote) I developed and refactored instrument simulation models for the Monarch surgical robot in C++ and Python.
The existing simulation code had limited physics modeling, and much of the instrument control algorithm used on the physical system had to be disabled in simulation. I was responsible for creating physics models based on procedure data logs. By modeling instrument behavior, the same control algorithms could be used in simulation as on the physical system, enabling verification of procedure workflow and increasing unit-test coverage.
Robotics & Engineering Co-opJuly 2022 - Dec 2022
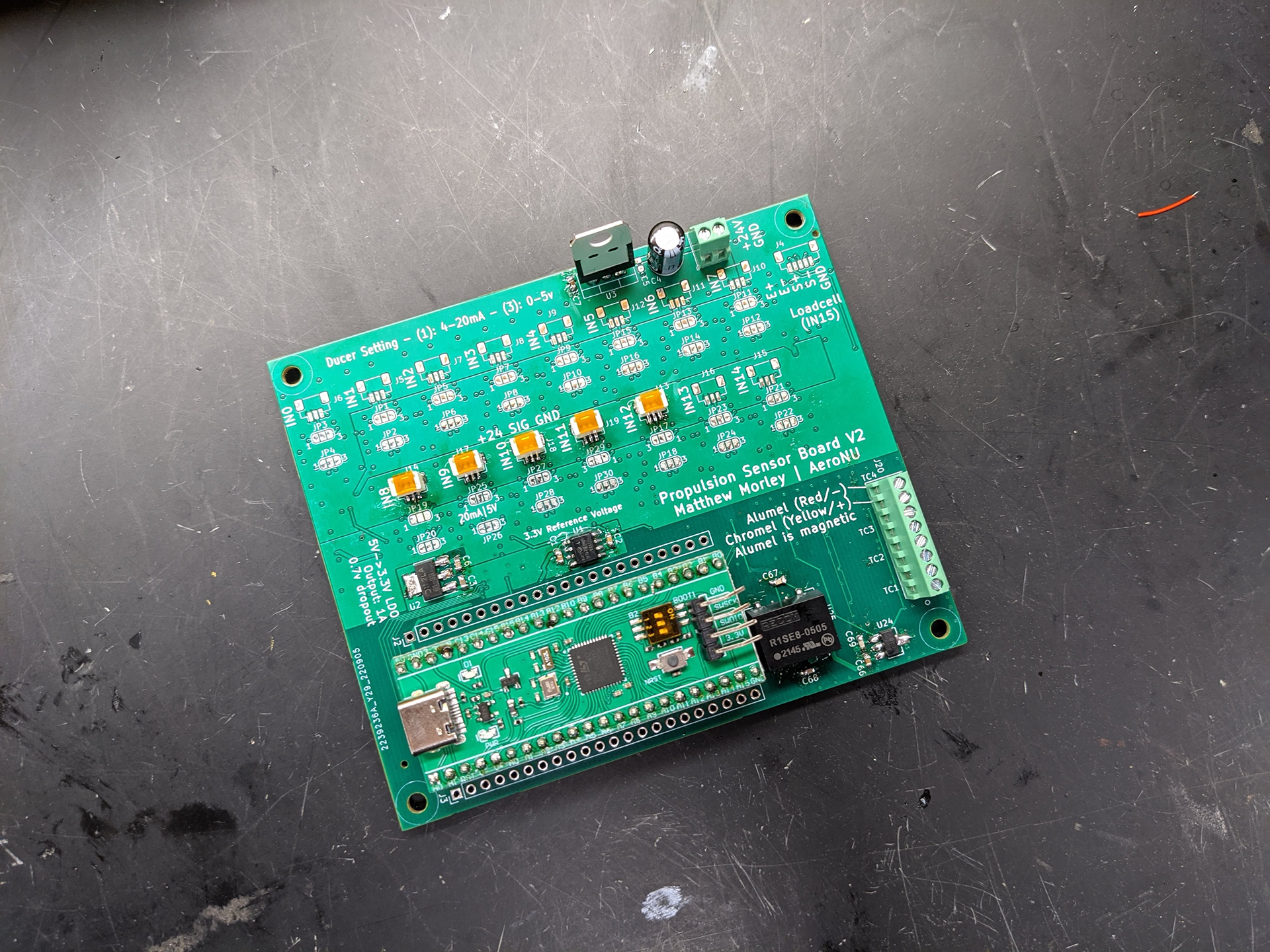
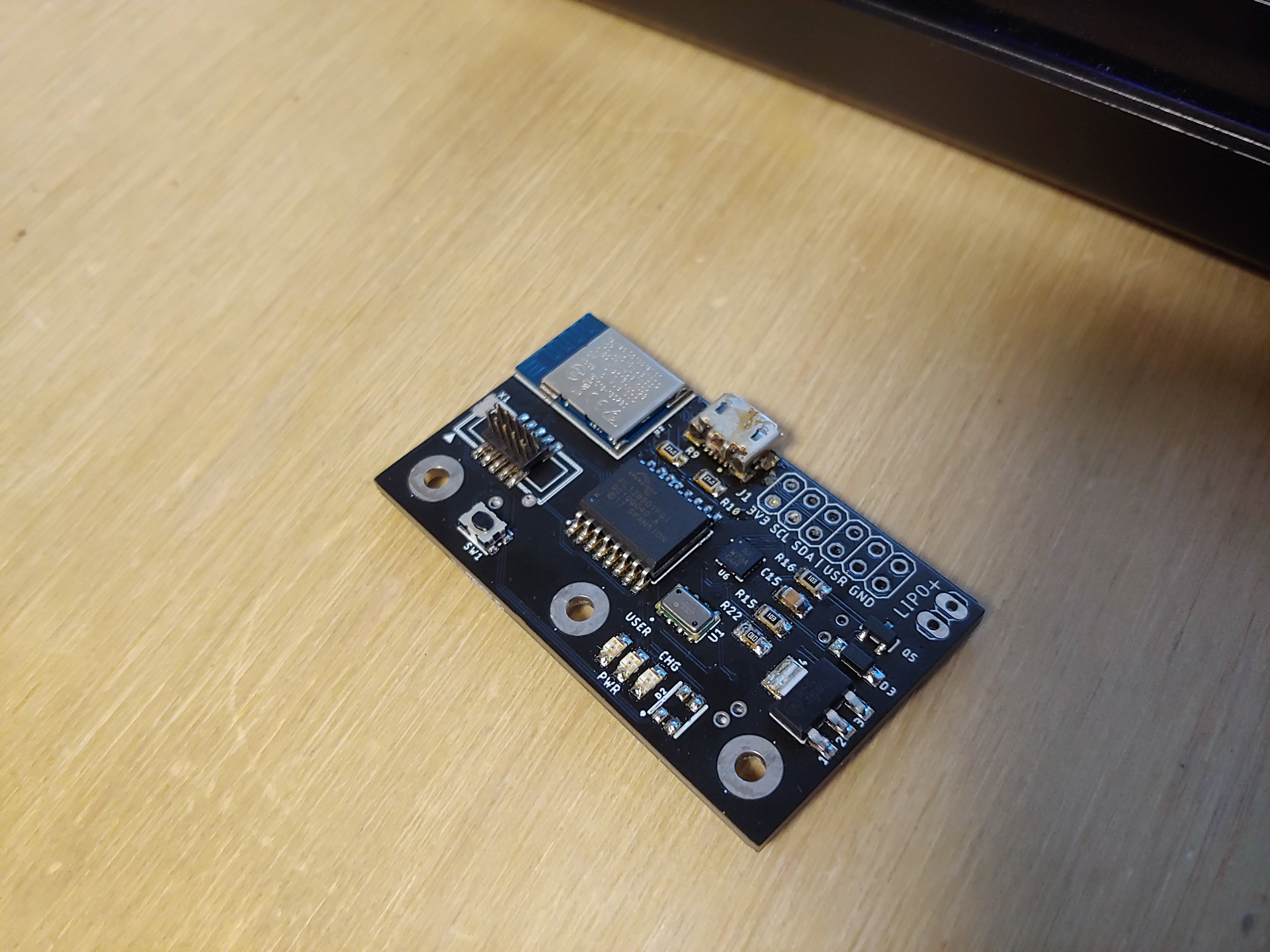
I performed new drone avionics bringup and debugging, designed PCBs, and wrote embedded software. I had the chance to work on a range of hardware and software projects, while supporting flight operations for the fleet of deployed GreenSight drones. My projects included design and assembly of drone avionics PCBs in KiCad, writing embedded software for LiDAR sensor arrays with C++ and ROS, and identifying issues with and reworking existing circuit boards.
I was also responsible for supporting flight operations by remotely managing daily drone flights capturing multispectral imagery at customer locations across the US. I gained my FAA Part 107 remote pilot license and performed test flights to evaluate experimental drone performance in real-world conditions.
Mechanical Engineering InternJune 2021 - Sep 2021
As an intern with the capital hardware group, I was responsible for the mechanical design, programming, and deployment of actuator test fixtures for the Ottava surgical robot. The fixtures repeatably measured safety-critical joint performance metrics on the manufacturing line, enabling verification against subsystem specifications.
I designed machined parts and generated drawings with GD&T using SOLIDWORKS and SOLIDWORKS PDM, and interfaced with quick-turn vendors to order machined parts. I also released fixture parts and drawing in Agile PLM.
I used Visual C++ to interface with COTS sensor and motor driver APIs, and created a basic Python GUI to visualize results and post-process test data using TKinter.